|
|
- 상품상세
- 관련상품
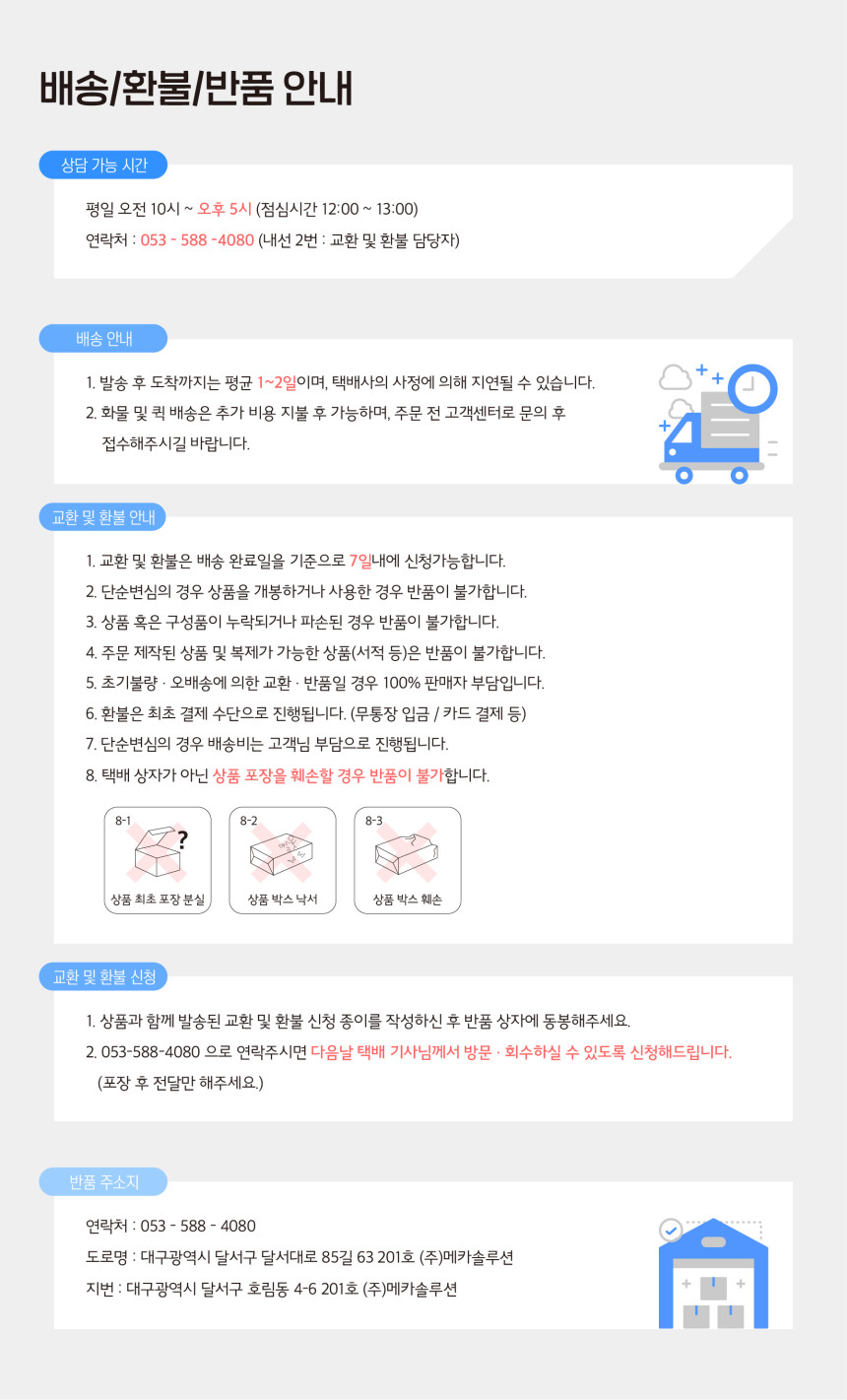
- 배송/교환/반품 안내
- 상품리뷰
|
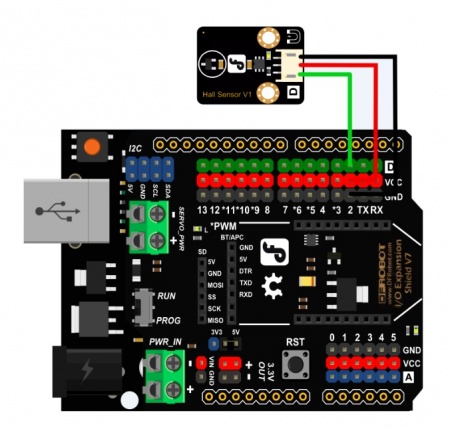
아두이노에 연결할 수 있는 홀센서로 케이블이 포함되어 있습니다.
다음과 같이 아두이노와 연결한 후에, 소스코드를 입력하면 됩니다.
int ledPin = 13;
int inputPin = 2;
int val = 0;
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(inputPin, INPUT);
}
void loop(){
val = digitalRead(inputPin);
if (val == HIGH) {
digitalWrite(ledPin, LOW);
} else {
digitalWrite(ledPin, HIGH);
}
}
응용 예제 (Application Examples) :
|

|
|
|
|